





Message loss level at 250 Kbps,%, not more than 1
SAE J1939 compatibility – CAN Open – DeviceNet – NMEA 2000
Nominal supply voltage, V 12/24 5 – on request 12/24 A ++ (low current consumption) – on request
Current consumption, mA for the “5V” version for the “12 / 24V” version for the “12/24 A ++” version 300 – 30/15 – 10/5
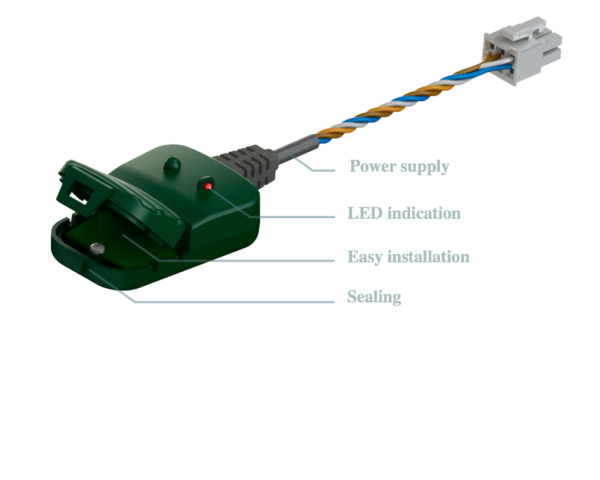
Cable length, m 0.7 – 2 – on request
Molex cable connector – bare wires – Special connector (specify when ordering)